"""
Reference: https://github.com/PredictiveIntelligenceLab/cvit/tree/main/ns/
"""
import os
import re
from os import path as osp
from typing import Dict
from typing import Sequence
from typing import Tuple
import einops
import h5py
import hydra
import numpy as np
import paddle
import tqdm
from matplotlib import pyplot as plt
from numpy.lib.stride_tricks import sliding_window_view
from omegaconf import DictConfig
import ppsci
dtype = paddle.get_default_dtype()
# Construct the full dataset
def prepare_ns_dataset(
directory: str,
mode: str,
keys: Sequence[str],
prev_steps: int,
pred_steps: int,
num_samples: int,
downsample: int = 1,
):
# Use list comprehension for efficiency
file_names = [
osp.join(directory, f)
for f in os.listdir(directory)
if re.match(f"^NavierStokes2D_{mode}", f)
]
# Initialize dictionaries to hold the inputs and outputs
data_dict = {key: [] for key in keys}
num_files = len(file_names)
f = h5py.File(file_names[0], "r")
s = f[mode][keys[0]].shape[0]
for i in tqdm.trange(min(num_files, num_samples // s + 1), desc="Reading files"):
with h5py.File(file_names[i], "r") as f:
data_group = f[mode]
for key in keys:
# Use memory-mapping to reduce memory usage
data_dict[key].append(np.array(data_group[key], dtype=dtype))
for key in keys:
data_dict[key] = np.vstack(data_dict[key])
data = np.concatenate(
[np.expand_dims(arr, axis=-1) for arr in data_dict.values()], axis=-1
)
data = data[:num_samples, :, ::downsample, ::downsample, :]
# Use sliding window to generate inputs and outputs
sliding_data = sliding_window_view(
data, window_shape=prev_steps + pred_steps, axis=1
)
sliding_data = einops.rearrange(sliding_data, "n m h w c s -> (n m) s h w c")
inputs = sliding_data[:, :prev_steps, ...]
outputs = sliding_data[:, prev_steps : prev_steps + pred_steps, ...]
return inputs, outputs # (B, T, H, W, C) (B, T', H, W, C)
def train(cfg: DictConfig):
# set model
model = ppsci.arch.CVit(**cfg.MODEL)
# prepare training data
train_inputs, train_outputs = prepare_ns_dataset(
cfg.DATA.path,
"train",
cfg.DATA.components,
cfg.DATA.prev_steps,
cfg.DATA.pred_steps,
cfg.TRAIN.train_samples,
cfg.DATA.downsample,
)
print("training input ", train_inputs.shape, "training label", train_outputs.shape)
train_outputs = einops.rearrange(train_outputs, "b t h w c -> b (t h w) c")
h, w = train_inputs.shape[2:4]
x_star = np.linspace(0, 1, h, dtype=dtype)
y_star = np.linspace(0, 1, w, dtype=dtype)
x_star, y_star = np.meshgrid(x_star, y_star, indexing="ij")
train_coords = np.hstack([x_star.flatten()[:, None], y_star.flatten()[:, None]])
train_coords = np.broadcast_to(
train_coords[None, :], [len(train_inputs), train_outputs.shape[1], 2]
)
# set constraint
def random_query(
input_dict: Dict[str, np.ndarray],
label_dict: Dict[str, np.ndarray],
weight_dict: Dict[str, np.ndarray],
) -> Tuple[Dict[str, np.ndarray], Dict[str, np.ndarray], Dict[str, np.ndarray]]:
y_key = cfg.MODEL.input_keys[1]
s_key = cfg.MODEL.output_keys[0]
# random select coords and labels
npos = input_dict[y_key].shape[1]
assert cfg.TRAIN.num_query_points <= npos, (
f"Number of query points({cfg.TRAIN.num_query_points}) must be "
f"less than or equal to number of positions({npos})."
)
random_pos = np.random.choice(npos, cfg.TRAIN.num_query_points, replace=False)
input_dict[y_key] = input_dict[y_key][0, random_pos]
label_dict[s_key] = label_dict[s_key][:, random_pos]
return (input_dict, label_dict, weight_dict)
sup_constraint = ppsci.constraint.SupervisedConstraint(
{
"dataset": {
"name": "NamedArrayDataset",
"input": {"u": train_inputs, "y": train_coords},
"label": {"s": train_outputs},
"transforms": [
{
"FunctionalTransform": {
"transform_func": random_query,
},
},
],
},
"batch_size": cfg.TRAIN.batch_size,
"auto_collation": False, # NOTE: Explicitly disable auto collation
},
output_expr={"s": lambda out: out["s"]},
loss=ppsci.loss.MSELoss("mean"),
name="Sup",
)
# wrap constraints together
constraint = {sup_constraint.name: sup_constraint}
# set optimizer
lr_scheduler = ppsci.optimizer.lr_scheduler.ExponentialDecay(
**cfg.TRAIN.lr_scheduler
)()
optimizer = ppsci.optimizer.AdamW(
lr_scheduler,
weight_decay=cfg.TRAIN.weight_decay,
grad_clip=paddle.nn.ClipGradByGlobalNorm(cfg.TRAIN.grad_clip),
)(model)
# set validator
test_inputs, test_outputs = prepare_ns_dataset(
cfg.DATA.path,
"test",
cfg.DATA.components,
cfg.DATA.prev_steps,
cfg.DATA.pred_steps,
cfg.EVAL.test_samples,
cfg.DATA.downsample,
)
print("testing input ", test_inputs.shape, "testing label", test_outputs.shape)
test_outputs = einops.rearrange(test_outputs, "b t h w c -> b (t h w) c")
h, w = test_inputs.shape[2:4]
x_star = np.linspace(0, 1, h, dtype=dtype)
y_star = np.linspace(0, 1, w, dtype=dtype)
x_star, y_star = np.meshgrid(x_star, y_star, indexing="ij")
test_coords = np.hstack([x_star.flatten()[:, None], y_star.flatten()[:, None]])
test_coords = np.broadcast_to(
test_coords[None, :], [len(test_inputs), test_outputs.shape[1], 2]
)
def l2_err_func(
output_dict: Dict[str, np.ndarray],
label_dict: Dict[str, np.ndarray],
) -> paddle.Tensor:
s_key = cfg.MODEL.output_keys[0]
l2_error = (
(output_dict[s_key] - label_dict[s_key]).norm(axis=1)
/ label_dict[s_key].norm(axis=1)
).mean() # average along batch and channels
return {"s_l2_err": l2_error}
s_validator = ppsci.validate.SupervisedValidator(
{
"dataset": {
"name": "NamedArrayDataset",
"input": {"u": test_inputs, "y": test_coords},
"label": {"s": test_outputs},
},
"batch_size": cfg.EVAL.batch_size,
},
loss=ppsci.loss.MSELoss("mean"),
metric={"s": ppsci.metric.FunctionalMetric(l2_err_func)},
name="s_validator",
)
validator = {s_validator.name: s_validator}
# initialize solver
solver = ppsci.solver.Solver(
model,
constraint,
validator=validator,
optimizer=optimizer,
cfg=cfg,
)
# train model
solver.train()
def evaluate(cfg: DictConfig):
# set model
model = ppsci.arch.CVit(**cfg.MODEL)
# init validator
test_inputs, test_outputs = prepare_ns_dataset(
cfg.DATA.path,
"test",
cfg.DATA.components,
cfg.DATA.prev_steps,
cfg.DATA.pred_steps,
cfg.EVAL.test_samples,
cfg.DATA.downsample,
)
print("test data", test_inputs.shape, test_outputs.shape)
test_outputs = einops.rearrange(test_outputs, "b t h w c -> b (t h w) c")
h, w = test_inputs.shape[2:4]
x_star = np.linspace(0, 1, h, dtype=dtype)
y_star = np.linspace(0, 1, w, dtype=dtype)
x_star, y_star = np.meshgrid(x_star, y_star, indexing="ij")
test_coords = np.hstack([x_star.flatten()[:, None], y_star.flatten()[:, None]])
test_coords = np.broadcast_to(
test_coords[None, :], [len(test_inputs), test_outputs.shape[1], 2]
)
def l2_err_func(
output_dict: Dict[str, np.ndarray],
label_dict: Dict[str, np.ndarray],
) -> paddle.Tensor:
s_key = cfg.MODEL.output_keys[0]
l2_error = (
(output_dict[s_key] - label_dict[s_key]).norm(axis=1)
/ label_dict[s_key].norm(axis=1)
).mean() # average along batch and channels
return {"s_l2_err": l2_error}
s_validator = ppsci.validate.SupervisedValidator(
{
"dataset": {
"name": "NamedArrayDataset",
"input": {"u": test_inputs, "y": test_coords},
"label": {"s": test_outputs},
},
"batch_size": cfg.EVAL.batch_size,
},
loss=ppsci.loss.MSELoss("mean"),
metric={"s_err": ppsci.metric.FunctionalMetric(l2_err_func)},
name="s_validator",
)
validator = {s_validator.name: s_validator}
# initialize solver
solver = ppsci.solver.Solver(
model,
validator=validator,
cfg=cfg,
)
# train model
solver.eval()
def export(cfg: DictConfig):
# set model
model = ppsci.arch.CVit(**cfg.MODEL)
# initialize solver
solver = ppsci.solver.Solver(model, cfg=cfg)
# export model
from paddle.static import InputSpec
input_spec = [
{
model.input_keys[0]: InputSpec(
[None, *cfg.MODEL.spatial_dims, cfg.MODEL.in_dim],
"float32",
name=model.input_keys[0],
),
model.input_keys[1]: InputSpec(
[None, cfg.MODEL.coords_dim], "float32", name=model.input_keys[1]
),
},
]
solver.export(
input_spec, cfg.INFER.export_path, with_onnx=False, ignore_modules=[einops]
)
def inference(cfg: DictConfig):
from deploy.python_infer import pinn_predictor
predictor = pinn_predictor.PINNPredictor(cfg)
test_inputs, test_outputs = prepare_ns_dataset(
cfg.DATA.path,
"test",
cfg.DATA.components,
cfg.DATA.prev_steps,
cfg.DATA.rollout_steps,
cfg.INFER.test_samples,
cfg.DATA.downsample,
)
print("test data", test_inputs.shape, test_outputs.shape)
test_outputs = einops.rearrange(test_outputs, "b t h w c -> b (t h w) c")
h, w = test_inputs.shape[2:4]
x_star = np.linspace(0, 1, h, dtype=dtype)
y_star = np.linspace(0, 1, w, dtype=dtype)
x_star, y_star = np.meshgrid(x_star, y_star, indexing="ij")
test_coords = np.hstack([x_star.flatten()[:, None], y_star.flatten()[:, None]])
s_key = cfg.MODEL.output_keys[0]
def rollout(x, coords, prev_steps=2, pred_steps=1, rollout_steps=5):
b, _, h, w, c = x.shape
pred_list = []
for k in range(rollout_steps):
input_dict = {"u": x, "y": coords}
pred = predictor.predict(input_dict, batch_size=None)
# mapping data to cfg.INFER.output_keys
pred = {
store_key: pred[infer_key]
for store_key, infer_key in zip(cfg.MODEL.output_keys, pred.keys())
}[s_key]
pred = pred.reshape(b, pred_steps, h, w, c)
pred_list.append(pred)
# auto regression step
x = np.concatenate([x, pred], axis=1)
x = x[:, -prev_steps:]
pred = np.concatenate(pred_list, axis=1)
return pred
l2_error_list = []
for i in range(0, len(test_inputs), cfg.INFER.batch_size):
st, ed = i, min(i + cfg.INFER.batch_size, len(test_inputs))
pred = rollout(
test_inputs[st:ed],
test_coords,
prev_steps=cfg.DATA.prev_steps,
pred_steps=cfg.DATA.pred_steps,
rollout_steps=cfg.DATA.rollout_steps,
)
pred = einops.rearrange(pred, "B T H W C-> B (T H W) C")
y = test_outputs[st:ed]
diff_norms = np.linalg.norm(pred - y, axis=1)
y_norms = np.linalg.norm(y, axis=1)
l2_error = (diff_norms / y_norms).mean(axis=1)
l2_error_list.append(l2_error)
l2_error = np.mean(np.array(l2_error_list))
print(f"{cfg.INFER.rollout_steps}-step l2_error:", l2_error)
# plot prediction of the first sample
plt.rcParams.update(
{
# "text.usetex": True, # NOTE: This may cause error when using latex
"font.family": "serif",
"font.serif": ["Computer Modern Roman"],
"font.size": 24,
}
)
pred = einops.rearrange(
pred, "B (T H W) C -> B T H W C", T=cfg.INFER.rollout_steps, W=w, H=h
)
y = einops.rearrange(
y, "B (T H W) C -> B T H W C", T=cfg.INFER.rollout_steps, W=w, H=h
)
from mpl_toolkits.axes_grid1 import make_axes_locatable
def plot(pred, ref, filename):
fig, axes = plt.subplots(
3,
cfg.INFER.rollout_steps,
figsize=((cfg.INFER.rollout_steps) * 5, 3 * 5),
gridspec_kw={"width_ratios": [1, 1, 1, 1.2]},
)
# plot reference
for t in range(cfg.INFER.rollout_steps):
res = pred[t]
im = axes[0, t].imshow(
res, cmap="turbo", vmin=res.min(), vmax=res.max(), aspect="auto"
)
axes[0, t].set_yticks([])
axes[0, t].xaxis.set_visible(False)
axes[0, 0].set_ylabel("Reference", size="large", labelpad=20)
divider = make_axes_locatable(axes[0, -1])
cax = divider.append_axes("right", size="5%", pad=0.5)
fig.colorbar(im, cax=cax)
# plot prediction
for t in range(cfg.INFER.rollout_steps):
res = ref[t]
im = axes[1, t].imshow(
res, cmap="turbo", vmin=res.min(), vmax=res.max(), aspect="auto"
)
axes[1, t].set_yticks([])
axes[1, t].xaxis.set_visible(False)
axes[1, 0].set_ylabel("Prediction", size="large", labelpad=20)
divider = make_axes_locatable(axes[1, -1])
cax = divider.append_axes("right", size="5%", pad=0.5)
fig.colorbar(im, cax=cax)
# plot abs error
for t in range(cfg.INFER.rollout_steps):
res = pred[t] - ref[t]
im = axes[2, t].imshow(
res, cmap="turbo", vmin=res.min(), vmax=res.max(), aspect="auto"
)
axes[2, t].set_yticks([])
axes[2, t].xaxis.set_visible(False)
axes[2, 0].set_ylabel("Abs. Error", size="large", labelpad=20)
divider = make_axes_locatable(axes[2, -1])
cax = divider.append_axes("right", size="5%", pad=0.5)
fig.colorbar(im, cax=cax)
plt.tight_layout()
plt.savefig(filename)
plt.close()
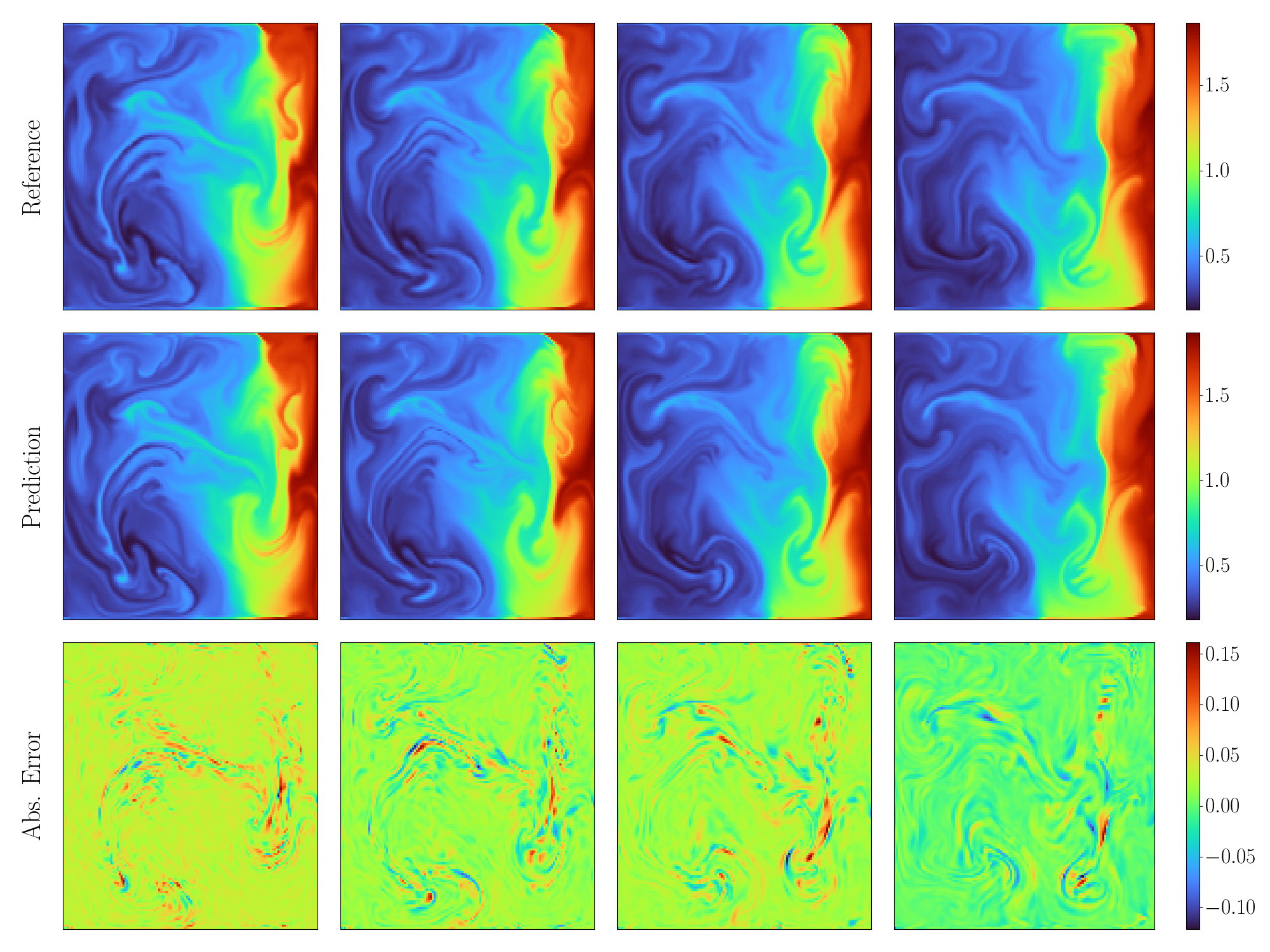
plot(pred[0, ..., 0], y[0, ..., 0], "./ns_u.png")
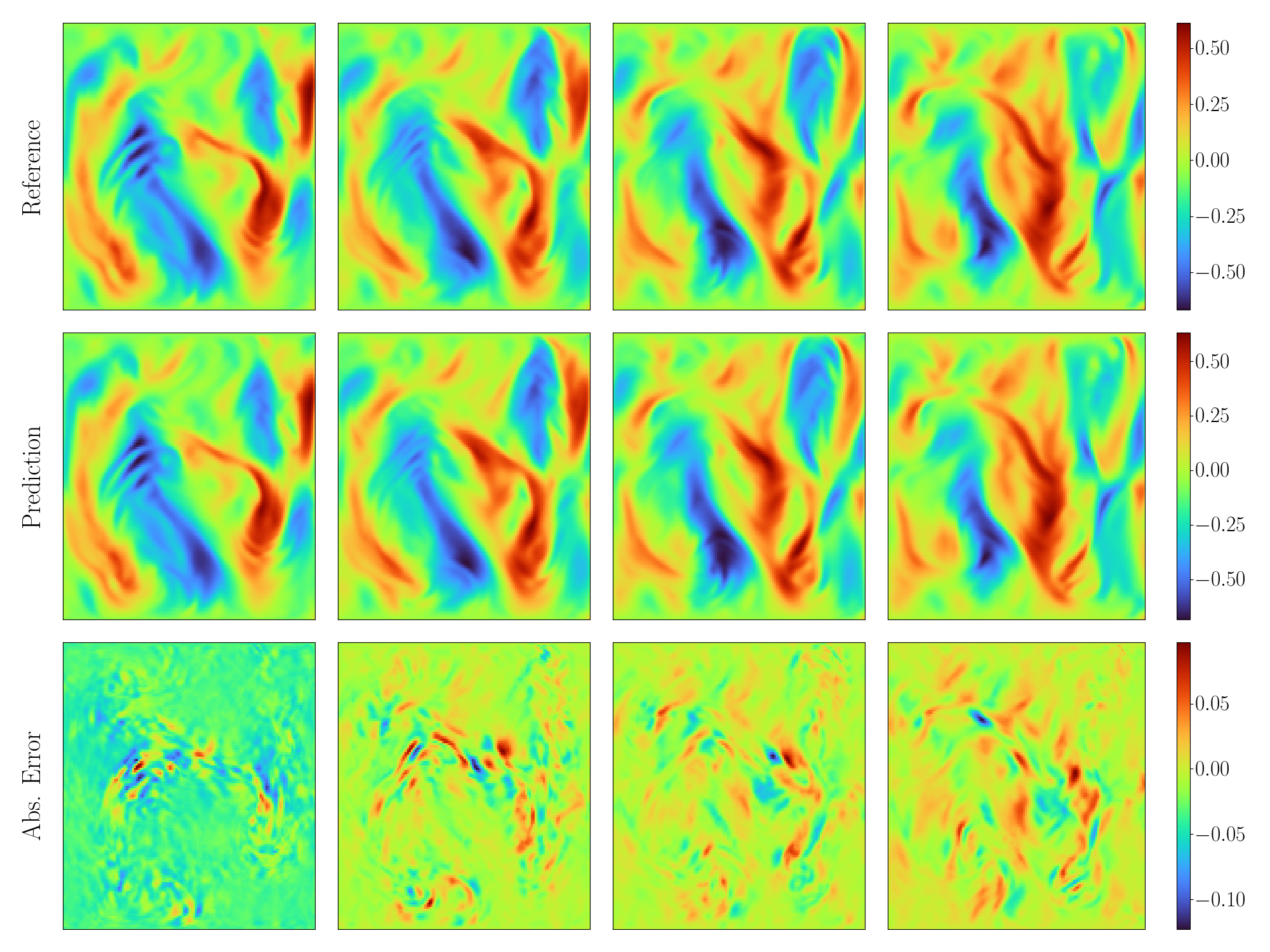
plot(pred[0, ..., 1], y[0, ..., 1], "./ns_ux.png")
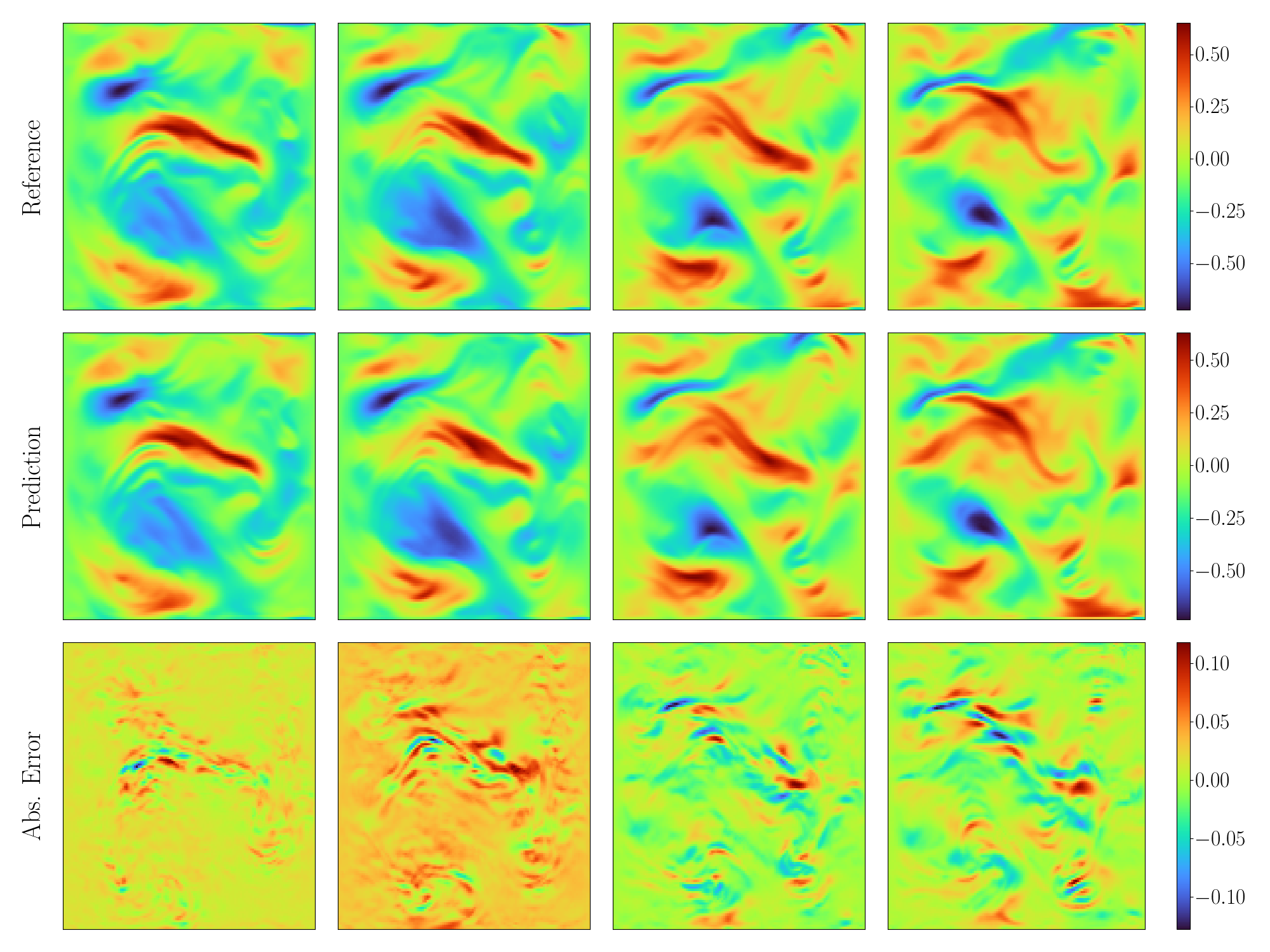
plot(pred[0, ..., 2], y[0, ..., 2], "./ns_uy.png")
@hydra.main(
version_base=None, config_path="./conf", config_name="ns_cvit_small_8x8.yaml"
)
def main(cfg: DictConfig):
if cfg.mode == "train":
train(cfg)
elif cfg.mode == "eval":
evaluate(cfg)
elif cfg.mode == "export":
export(cfg)
elif cfg.mode == "infer":
inference(cfg)
else:
raise ValueError(
f"cfg.mode should in ['train', 'eval', 'export', 'infer'], but got '{cfg.mode}'"
)
if __name__ == "__main__":
main()